جلسه دفاع پایان نامه: زهرا دارستانی فراهانی، گروه طرحی کاربردی
عنوان پایان نامه: شبیهسازی و ردیابی مسیر کوادروتور با جبرانسازی اثر باد به کمک یادگیری تقویتی

ارائهکننده: زهرا دارستانی فراهانی استاد راهنما: دکتر مجید سادهدل استاد ناظر داخلی: دکتر مهدی سجادپور استاد ناظر خارجی اول: دکتر مهدی رعایایی اردکانی استاد ناظر خارجی دوم: دکتر موسی آیتی تاریخ: 1404/07/19ساعت: ۱۶ تا ۱۸ مکان: دانشکده فنی و مهندسی، بلوک شماره سه، طبقه همکف، آزمایشگاه آمیک
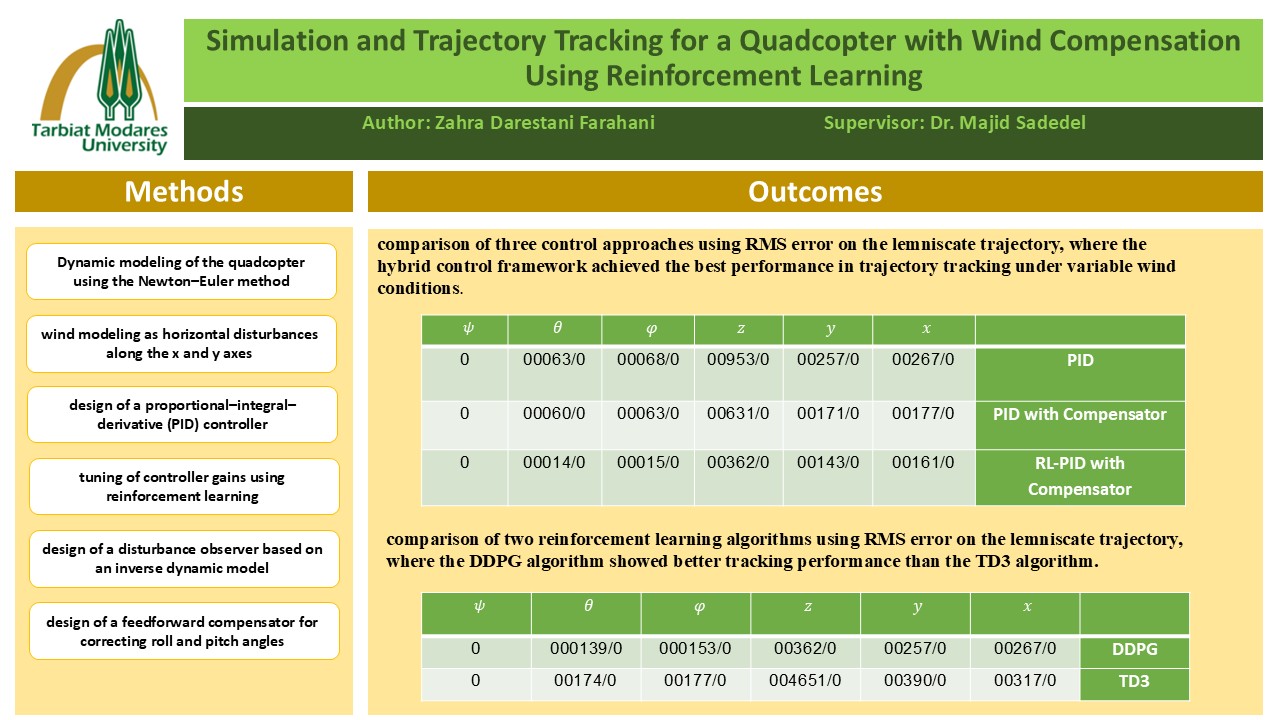
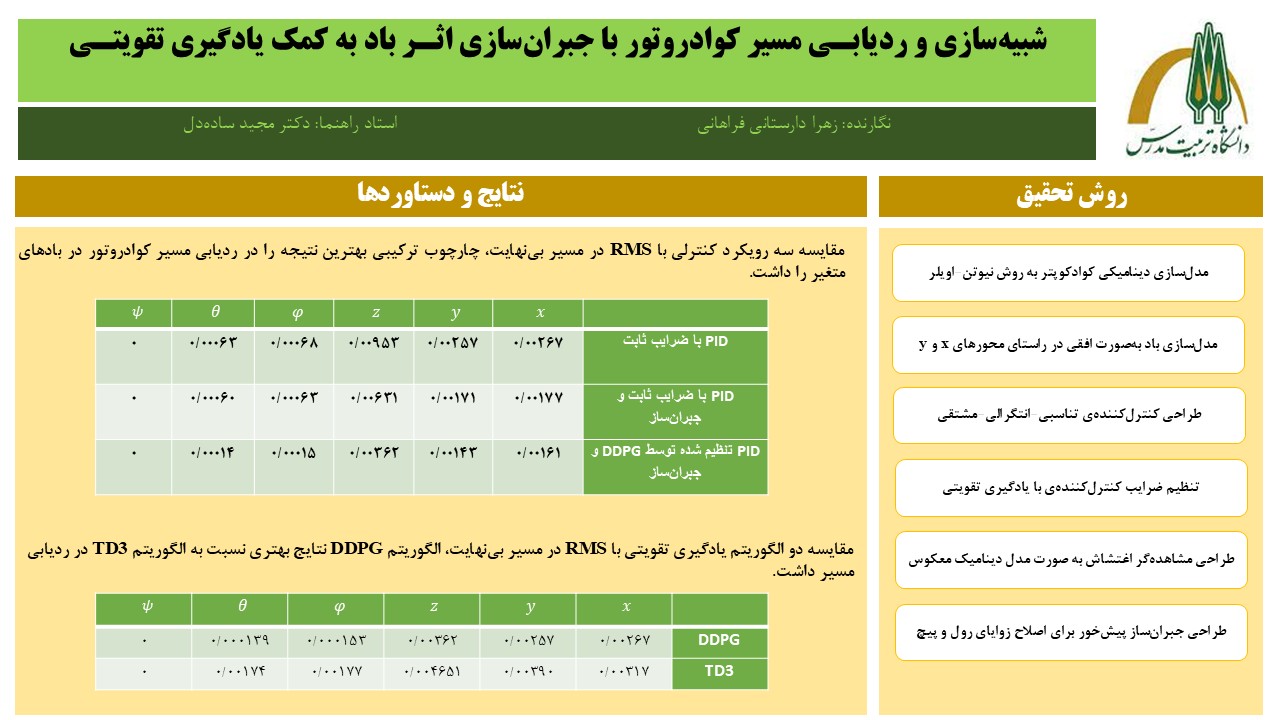
چکیده: امروزه با توجه به افزایش روزافزون بکارگیری کوادروتورها در ماموریتهای مختلف، بهرهگیری از سیستم کنترلی کارآمد و مؤثر ضروری میباشد. کوادروتور در محیطهای بیرونی با اغتشاشات خارجی مختلفی از جمله وزش ناگهانی باد مواجه میشود. در بسیاری از مأموریتها مسیر پروازی کوادکوپتر بهطور دقیق و از پیش تعیینشده مشخص میباشد، به همین دلیل ردیابی صحیح این مسیر اهمیت ویژهای دارد. به دلیل تاثیر مستقیم باد بر پایداری پرواز، پرنده باید با نهایت دقت و بدون انحراف از مسیر مرجع، اهداف تعیین شده را دنبال نماید. هدف این پژوهش، طراحـی کنتـرلکننده هـوشمند برای دستیابـی به ردیابـی مسیرهای مختلف کوادکوپتـر در محیطهایی با بادهای متغیـر میباشد. به این منظور ابتدا به مدلسازی دینامیکی کوادروتور پرداخته شد. مدلسازی باد نیز با اضافه کردن شتاب باد در راستای افقی به معادلات دینامیکی انتقالی پرنده انجام شد. سپس، با هدف کنترل دقیق موقعیت و جهتگیری کوادروتور در حضور اغتشاشات محیطی باد، چارچوبی ترکیبی طراحی شد که شامل یک کنترلکنندهی پایه تناسبی-انتگرالی-مشتقی، یک تنظیمکنندهی ضرایب مبتنی بر یادگیری تقویتی و یک مشاهدهگر اغتشاش بههمراه جبرانساز آن بود. برای تنظیم تطبیقی ضرایب کنترلکننده تناسبی-انتگرالی-مشتقی حین ردیابی مسیر از الگوریتـمهای DDPGوTD3 یادگیری تقویتی بهره برده شد. جهت تخمین شدت باد از یک مدل دینامیک معکوس به عنوان مشاهدهگر استفاده شد. همچنین یک الگوریتم جبرانسازی پیشخور برای اصلاح زوایای مرجع رول و پیچ طراحی شد. جبرانساز با اصلاح زوایای رول و پیچ، انحراف موقعیت را نیز در جهت محورهای x و yجبران میکرد. جهت ارزیابی عملکرد چارچوب کنترلی، آزمایشهای مختلفی در شرایط بدون باد و با شدتهای مختلف باد در مسیرهای مختلف پروازی انجام شد. نتایـج شبیهسازیهای انجام گرفته نشان دادند که در محیطهایی با بادهای متغیـر، اضافه شدن مشاهدهگر اغتشاش و جبرانساز به کنتـرلکننده تناسبـی-انتگرالـی-مشتقـی با ضرایب ثابت 15% خطا را نسبت به حالتی که کنتـرلکننده به تنهایی عمل میکرد کاهش داد. همچنین در آزمایشهای دیگر نتایـج شبیهسازیها نشان دادند که کنتـرلکننده تناسبـی-انتگرالـی-مشتقـی تنظیمشده با الگوریتمهای یادگیری تقویتی همراه با مشاهدهگر و جبرانساز نسبت به حالت ضریب ثابت 25% خطای ردیابی را کاهش داد. در ردیابی مسیرهای مختلف با شدت باد متغیر از الگوریتمهای یادگیری تقویتی نتایج قابل توجهی دریافت شد. در مسیر بینهایت الگوریتم DDPG، %10 بهینهتر از الگوریتم TD3، در مسیر دایروی الگوریتم TD3 %5 بهینهتر از الگوریتم DDPG، و در مسیرهای مارپیچ نیز الگوریتم DDPG، %20 بهینهتر از الگوریتم TD3 عمل کرد.