جلسه دفاع پایان نامه: وحید صباغی، گروه طراحی کاربردی
جلسه دفاع پایان نامه وحید صباغی با عنوان «طراحی و شبیهسازی کنترلکننده ضدنوسان برای کوادروتور با بار معلق از کابل انعطافپذیر با استفاده از یادگیری تقویتی» 7 تیر ماه 1405 برگزار می شود.

ارائهکننده: وحید صباغی
استاد راهنما: دکتر مجید سادهدل
استاد ناظر داخلی: دکتر مهدی سجادپور
استاد ناظر خارجی: دکتر اسماعیل خانمیرزا
تاریخ: 1405/04/07
ساعت: 10:30
مکان: دانشکده مهندسی مکانیک، طبقه سوم شرقی، اتاق 351
چکیده:
کنترل کوادروتور حامل بار آویزان بهدلیل وجود دینامیک غیرخطی و نوسانات ناشی از کابل انعطافپذیر، از چالشهای مهم در سامانههای پرنده بدون سرنشین بهشمار میرود. با توجه به گسترش کاربرد کوادروتورها در مأموریتهایی نظیر حملونقل کالا، امداد و نجات، بازرسی و عملیات پشتیبانی، توسعه روشهای کنترلی کارآمد برای کاهش نوسانات بار و بهبود عملکرد پروازی از اهمیت ویژهای برخوردار است.در این پژوهش، یک ساختار کنترلی ترکیبی مبتنی بر کنترلکننده تناسبی، انتگرالی و مشتقی آبشاری و الگوریتم گرادیان سیاست قطعی عمیق دوقلو برای بهبود پایداری پرواز و کاهش نوسانات بار ارائه شده است.
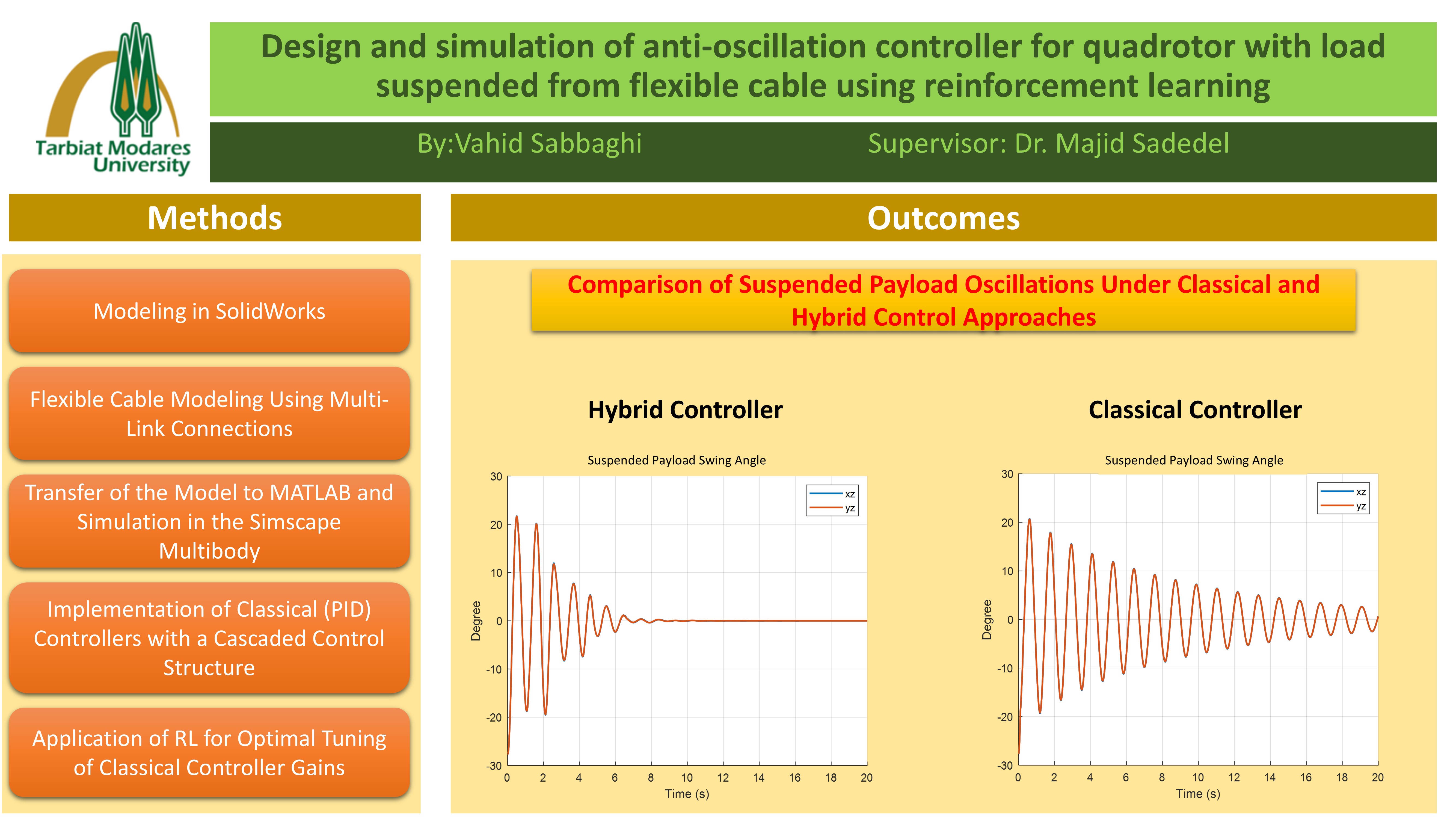
کنترلکننده کلاسیک وظیفه تثبیت اولیه وضعیت و موقعیت کوادروتور را بر عهده داشته و عامل یادگیری تقویتی با تنظیم بهینه ضرایب کنترلی در طول زمان، نوسانات کابل و بار را میرا میکند. آموزش عامل یادگیری تقویتی با استفاده از تابع پاداش طراحیشده بر اساس خطاهای موقعیت، زاویه و قیود ایمنی انجام شده و همگرایی مناسب آن از طریق تحلیل نمودار پاداش تأیید گردیده است. نتایج شبیهسازی نشان میدهد که ساختار پیشنهادی در مقایسه با کنترلکننده کلاسیک موجب کاهش زمان میرایی نوسانات بار از بیش از 20 ثانیه به 12 ثانیه در سناریو اول، 16 ثانیه در سناریو دوم و 18 ثانیه در سناریو سوم شده است.