جلسه دفاع پایان نامه: عرفان نعمتی خیاوی، گروه کنترل
عنوان پایان نامه: موقعیتیابی تلفیقی UWB/INS برای رباتهای پرنده در محیطهای بسته (بدون GPS) با دقت حداقل 40 سانتیمتر

ارائه کننده: عرفان نعمتی خیاوی استاد راهنما: دکتر سجاد ازگلی استاد ناظر داخلی: دکتر وحید جوهری مجد استاد ناظر خارج از دانشگاه: دکتر ایمان محمد زمان (دانشگاه مالک اشتر) تاریخ: ۱۴۰۳/۰۸/۰۶ ساعت: ۱۵ مکان: دانشکده مهندسی برق و کامپیوتر دانشگاه تربیت مدرس، اتاق ۶.۳۶، آزمایشگاه سیلیکن
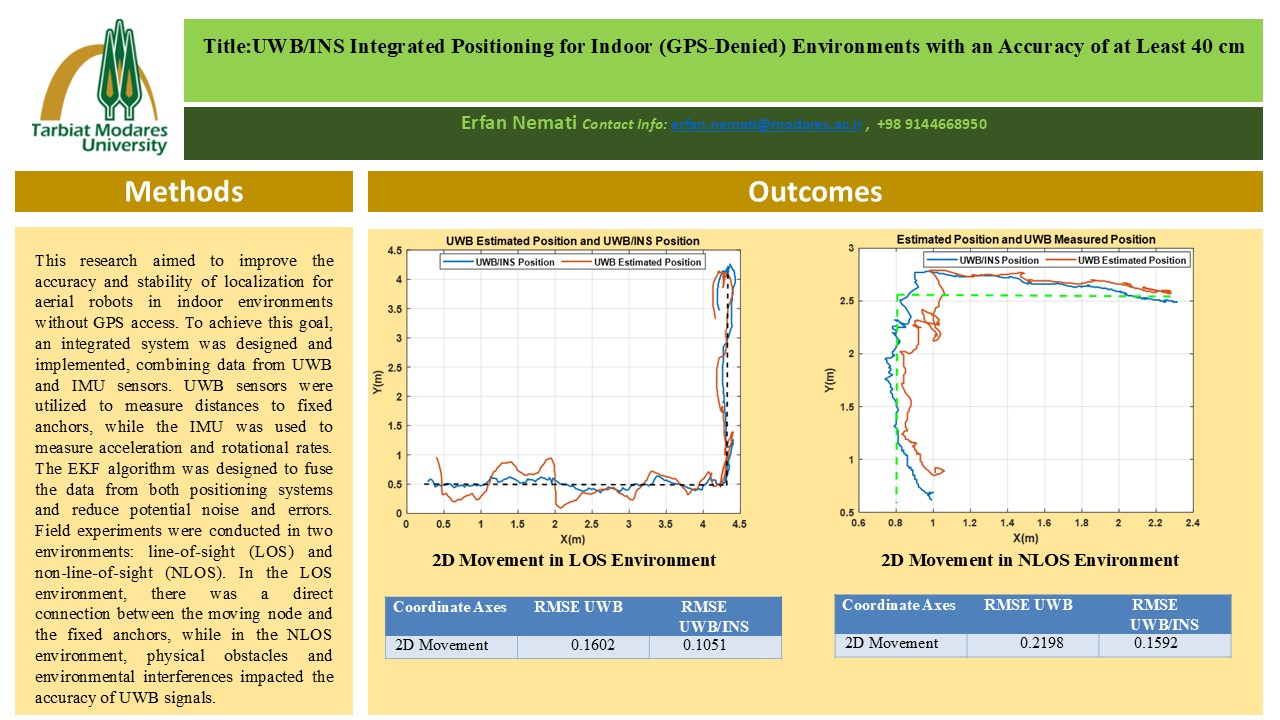
چکیده: این پژوهش رویکردی نوآورانه برای موقعیت یابی دقیق و قابل اعتماد ربات های پرنده در محیط های بسته ارائه می دهد. به دلیل عدم دسترسی به سامانه های ماهواره ای مانند GPS در محیط های بسته، ترکیب فناوری باند فوق العاده پهن )UWB ( و سامانه ناوبری لخت) INS (به عنوان راهکاری کارآمد در نظر گرفته شده است. در این روش، فناوری UWB دقت بالایی در اندازه گیری فاصله بین گره های مرجع و ربات فراهم می آورد و سامانه INS نیز داده های شتاب سنج و ژیروسکوپ را برای برآورد موقعیت، سرعت و جهت گیری ربات به کار می گیرد. ترکیب این دو سامانه از طریق الگوریتم فیلتر کالمن توسعه یافته (EKF) به بهبود دقت و پایداری موقعیت یابی کمک می کند، به طوری که حتی در شرایط اغتشاش محیطی، موانع فیزیکی یا دسترسی محدود به سیگنال های مستقیم، موقعیت یابی دقیق با دقت حداقل ۴۰ سانتی متر حاصل می شود.