جلسه دفاع رساله: سهند حسینپور ملکوتی، گروه کنترل
جلسه دفاع رساله سهند حسین پور با عنوان «طراحی و کنترل شخصمحور ارتز فعال زانو» 11 خرداد ۱۴۰۵ برگزار می شود.

ارائهکننده: سهند حسینپور ملکوتی
استاد راهنما: دکتر سجاد ازگلی
استاد ناظر داخلی اول: دکتر مهدی سجودی
استاد ناظر داخلی دوم: دکتر پویا بدری
استاد ناظر خارجی اول: دکتر وهاب نکوکار (دانشگاه شهید رجایی)
استاد ناظر خارجی دوم: دکتر محمّد نجفی آشتیانی (دانشگاه تربیت مدرس)
تاریخ: 11/03/1405
ساعت: 13 الی 15
مکان: بلوک 3، طبقه سوم، اتاق 315
چکیده:
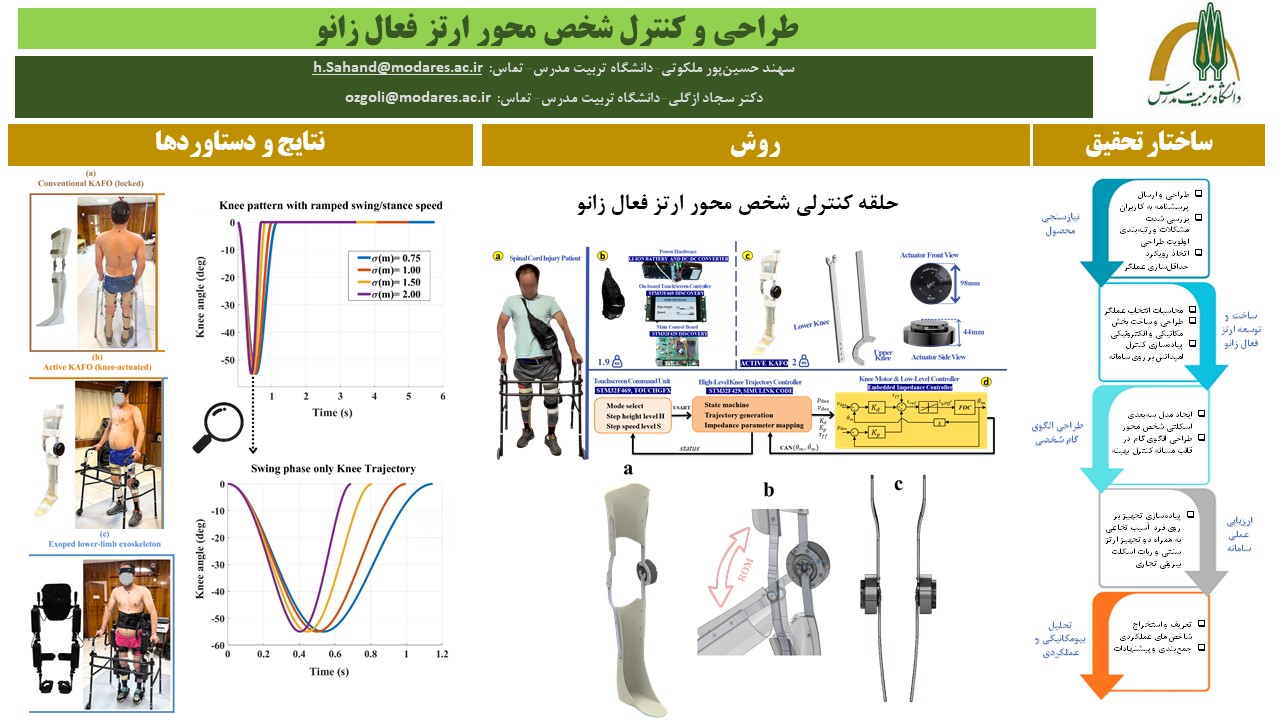
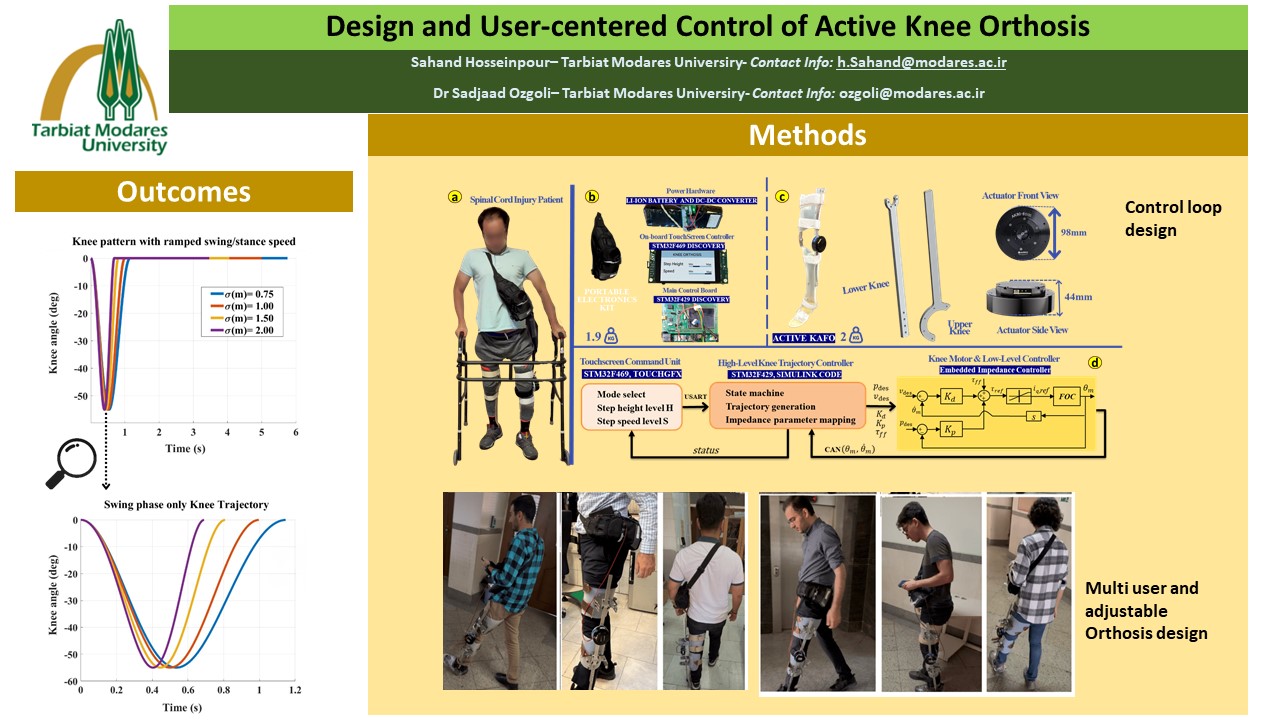
راهرفتن با تجهیزات کمکحرکتی در افراد مبتلا به ضایعه نخاعی همواره با موازنهای میان بهبود عملکرد گیت و استفادهپذیری واقعی همراه است. در این راستا، پژوهش جاری یک چارچوب یکپارچه مبتنی بر رویکرد حداقلسازی عملگر را در ارتزهای پوشیدنی ارائه میدهد که در آن مفصل زانو بهعنوان تنها درجه آزادی فعال در نظر گرفته میشود. این چارچوب ابتدا با یک فرآیند نیازسنجی شروع شده و نتایج آن مبنای طراحی و کنترل شحصمحور ارتز فعال زانو قرار میگیرد. در ادامه، دو مسیر مکمل طراحی دنبال میگردد. نخست، توسعه نسخه تنظیمپذیر با الگوی حرکتی پارامتری و دوم، ارائه فرآیندی برای تولید الگوی حرکتی شخصمحور. در این راستا، الگوی حرکتی شخصی، بر اساس مدل اسکلتی و دادههای حرکتی فرد، تحت یک بهینهسازی سینماتیکی در محیط opensim تولید شد. سپس این الگوی حرکتی بر روی ارتز فعال زانو پیادهسازی و به همراه دو تجهیز رقیب دیگر شامل ارتز غیرفعال و ربات اسکلت بیرونی، بر روی کاربر ضایعه نخاعی مقایسه گردید. نتایج پیادهسازی نشان داد که ارتز فعال با الگوی شخصیشده میتواند شاخصهای حرکتی کاربر نسبت به راه رفتن با ارتز غیرفعال را به طرز قابل توجّهی بهبود ببخشیده و در عین حال، نسبت به ربات اسکلت بیرونی، در اکثر شاخصهای کلیدی عملکرد مشابهی داشته باشد. نتایج حاکی از آن است که این تجهیز میتواند بهعنوان گزینهای میانه و بهینه بین ارتزهای سنتی و اسکلتهای بیرونی چندمفصله قرار بگیرد.